
图像处理基础
编辑引言
本内容主要旨在实现图像合成、线性滤波、颜色分割和几何变换。
图像合成
目标: 合成一幅包含红、绿、蓝三个圆及其重叠部分的图像,以实现颜色的叠加。
计算三个圆的中心坐标 x_0 和 y_0,计算每个圆的掩码矩阵 V,并使用显式和隐式两种方法计算距离矩阵,验证了掩码的有效性。最后,提取每个圆的 RGB 通道,将其组合成一个 256 \times 256 \times 3 的 RGB 图像。
线性滤波
目标: 观察在应用不同滤波器的同时,图像在空间域和频率域中的变化,以理解这些滤波器对图像的影响,并将其应用于图像去噪。
首先使用低通滤波器来平滑图像,并观察其傅里叶变换,然后对图像进行去噪。首先使用均值、圆盘和高斯低通滤波器,我们发现它们无法消除特定频率的噪声,即滤波效果不佳。因此,使用带阻滤波器(在空间域中构建了一个由余弦函数调制的高斯滤波器)。
最后,应用高通滤波器来突出图像的边缘并提高其对比度。使用拉普拉斯算子 L 实现高通滤波。应用此高通滤波器 L 后,观察到图像的边缘被突出显示。然后,通过从原始图像中减去拉普拉斯滤波后的图像,从而实现对比度的增强。通过调整参数 \alpha,可以观察到对比度和边缘清晰度的变化。并且从空间域和频率域的角度解释这种操作如何改善图像。
颜色分割
目标: 通过颜色分割技术,根据参考颜色对图像进行分割,并将其应用于更换图像背景。
首先,通过分析背景区域的 RGB 直方图,确定绿色背景的取值范围,从而生成了一个掩码。然而,发现 RGB 空间中的分割效果不佳,因此转向 YCbCr 空间进行颜色分割,即分析 Cb 和 Cr 分量的直方图。然后,使用阈值分割成功地提取了绿色背景。随后进行背景替换,最后实现对亮点的检测和提取。
图像的几何变换
目标: 理解并实现图像的几何变换,包括插值、坐标变换和单应变换。
使用最近邻、双线性和双三次插值方法,对提取的图像部分进行了插值放大。比较后,发现双三次插值方法的效果最佳,边缘更平滑。接下来,使用极坐标变换和插值来展开全景图像。使用矩阵 H 来实现图像的平移、缩放和旋转。最后进行单应变换,类似于将一张纸从一个摄像机视角转换到另一个视角,实质上是图像平面的变换。
第一部分 图像合成
目标: 合成一幅包含红、绿、蓝三个圆及其重叠部分的图像,以实现颜色的叠加。
已知数据:
图像大小: 256 \times 256
圆的半径:r = 70
图像中心到三个圆心的距离:d = 45
通过红色和绿色圆盘的线与水平轴之间的角度: \pi/6
RGB 颜色合成
a) 定义变量 r 和 d,计算三个圆心的坐标 x_0, y_0(以图像中心 (128,128) 为参考)。
#%% 问题 1a
image_center_x = 128
image_center_y = 128
r = 70 # 圆的半径
d = 45 # 图像中心到圆心的距离
# 角度
theta_R = m.pi / 6 # 红色圆的角度,30°
theta_G = 5 * m.pi / 6 # 绿色圆的角度,150°
theta_B = 3 * m.pi / 2 # 蓝色圆的角度,270°
# 计算圆心坐标
# 红色圆
X0_R = image_center_x + d * m.cos(theta_R)
Y0_R = image_center_y - d * m.sin(theta_R)
# 绿色圆
X0_G = image_center_x + d * m.cos(theta_G)
Y0_G = image_center_y - d * m.sin(theta_G)
# 蓝色圆
X0_B = image_center_x + d * m.cos(theta_B)
Y0_B = image_center_y - d * m.sin(theta_B)
print(f"红色圆的圆心: ({X0_R}, {Y0_R})")
print(f"绿色圆的圆心: ({X0_G}, {Y0_G})")
print(f"蓝色圆的圆心: ({X0_B}, {Y0_B})")得到以下结果:
红色圆的圆心: (166.97114317029974, 105.5)
绿色圆的圆心: (89.02885682970026, 105.5)
蓝色圆的圆心: (127.99999999999999, 173.0)
b) 计算所选圆的掩码,即一个 256 \times 256 的标量图像 V,其中圆内的像素值为 1,其他位置为 0。可以定义一个中间矩阵 D 表示到圆心的距离。
使用显式循环:
#%% 问题 1b
M, N = 256, 256
# 计算每个像素到红色圆心的距离
D_R = np.zeros((M, N))
for i in range(M):
for j in range(N):
D_R[i, j] = np.sqrt((j - X0_R) ** 2 + (i - Y0_R) ** 2)
V_R = np.where(D_R <= r, 1, 0).astype(np.uint8)
# 计算每个像素到绿色圆心的距离
D_G = np.zeros((M, N))
for i in range(M):
for j in range(N):
D_G[i, j] = np.sqrt((j - X0_G) ** 2 + (i - Y0_G) ** 2)
V_G = np.where(D_G <= r, 1, 0).astype(np.uint8)
# 计算每个像素到蓝色圆心的距离
D_B = np.zeros((M, N))
for i in range(M):
for j in range(N):
D_B[i, j] = np.sqrt((j - X0_B) ** 2 + (i - Y0_B) ** 2)
V_B = np.where(D_B <= r, 1, 0).astype(np.uint8)
# 组合三个通道形成彩色图像
R = V_R * 255
G = V_G * 255
B = V_B * 255
img_RGB = np.stack((R, G, B), axis=2)
# 显示结果
cv2.imshow("RGB Disk Mask", img_RGB)
cv2.waitKey(0)
cv2.destroyAllWindows()c) 使用隐式循环实现相同的计算:
#%% 问题 1c
# 使用隐式循环计算掩码
M, N = 256, 256
# 创建坐标网格
D_x, D_y = np.meshgrid(range(M), range(N))
# 到红色圆心的距离矩阵
D_R = np.sqrt((D_x - X0_R) ** 2 + (D_y - Y0_R) ** 2)
V_R = np.where(D_R <= r, 1, 0).astype(np.uint8)
# 到绿色圆心的距离矩阵
D_G = np.sqrt((D_x - X0_G) ** 2 + (D_y - Y0_G) ** 2)
V_G = np.where(D_G <= r, 1, 0).astype(np.uint8)
# 到蓝色圆心的距离矩阵
D_B = np.sqrt((D_x - X0_B) ** 2 + (D_y - Y0_B) ** 2)
V_B = np.where(D_B <= r, 1, 0).astype(np.uint8)d) 为每个圆生成掩码,并推导出对应于每个颜色通道 R、G 和 B 的矩阵,其值范围为 0 到 255。
# 组合三个通道形成彩色图像
R = V_R * 255
G = V_G * 255
B = V_B * 255e) 沿第三维将三个通道 R、G 和 B 组合成一个 256 \times 256 \times 3 的矩阵。
img_RGB = np.stack((B, G, R), axis=2)
cv2.imshow("RGB Disk Mask", img_RGB)
cv2.waitKey(0)
# cv2.destroyAllWindows()
图像 1:RGB 圆形掩码
索引颜色的合成
a) 使用 PIL 库定义一个包含 8 种颜色的调色板,用于索引颜色的合成。调色板的颜色顺序为:黑、红、绿、黄、蓝、品红、青和白。
#%% 问题 2a
from PIL import Image
# 定义包含 8 种颜色的调色板
palette = [ 0, 0, 0, # 黑
255, 0, 0, # 红
0, 255, 0, # 绿
255, 255, 0, # 黄
0, 0, 255, # 蓝
255, 0, 255, # 品红
0, 255, 255, # 青
255, 255, 255] # 白
# 创建一个 PIL 图像并应用调色板
img_indexed = Image.new("P", (M, N))
img_indexed.putpalette(palette)b) 使用显式循环遍历每个像素位置,并为每个像素赋予对应的颜色索引。例如,对于位置 (i,j) 的像素:
#%% 问题 2b
# 初始化图像大小
M, N = 256, 256
# 初始化索引图像矩阵
indexed_img = np.zeros((M, N), dtype=np.uint8)
# 使用显式循环分配颜色索引
for i in range(M):
for j in range(N):
if R[i, j] == 0 and G[i, j] == 0 and B[i, j] == 0:
indexed_img[i, j] = 0 # 黑色
elif R[i, j] == 255 and G[i, j] == 0 and B[i, j] == 0:
indexed_img[i, j] = 1 # 红色
elif R[i, j] == 0 and G[i, j] == 255 and B[i, j] == 0:
indexed_img[i, j] = 2 # 绿色
elif R[i, j] == 255 and G[i, j] == 255 and B[i, j] == 0:
indexed_img[i, j] = 3 # 黄色
elif R[i, j] == 0 and G[i, j] == 0 and B[i, j] == 255:
indexed_img[i, j] = 4 # 蓝色
elif R[i, j] == 255 and G[i, j] == 0 and B[i, j] == 255:
indexed_img[i, j] = 5 # 品红
elif R[i, j] == 0 and G[i, j] == 255 and B[i, j] == 255:
indexed_img[i, j] = 6 # 青色
elif R[i, j] == 255 and G[i, j] == 255 and B[i, j] == 255:
indexed_img[i, j] = 7 # 白色
# 将生成的索引矩阵转换为 PIL 图像
img_indexed = Image.fromarray(indexed_img, mode='P')
img_indexed.putpalette(palette)
img_indexed.show()c) 不使用显式循环实现相同的操作。颜色索引可以根据掩码的二进制编码进行排序,索引的计算如下:
#%% 问题 2c
# 定义图像大小
M, N = 256, 256
# 使用矢量化操作直接计算颜色索引
indexed_img = 1 * (R > 0) + 2 * (G > 0) + 4 * (B > 0)
# 定义包含 8 种颜色的调色板
palette = [ 0, 0, 0, # 黑色
255, 0, 0, # 红色
0, 255, 0, # 绿色
255, 255, 0, # 黄色
0, 0, 255, # 蓝色
255, 0, 255, # 品红
0, 255, 255, # 青色
255, 255, 255]# 白色
# 将生成的索引矩阵转换为 PIL 图像
img_indexed = Image.fromarray(indexed_img.astype(np.uint8), mode='P')
img_indexed.putpalette(palette)
img_indexed.show()
图像 2:索引颜色的 RGB 圆形掩码
颜色索引是一种有效减少存储空间的方法。我们不需要为每个像素存储完整的 RGB 值,只需存储指向调色板中预定义颜色的索引。
第二部分 线性滤波
低通滤波/平滑
目标: 我们在此考虑一个 3 \times 3 的均值滤波器:
使用此滤波器,我们将观察或消除特定的频谱分量,最终观察其效果。
1. 低通滤波的空间效应
a) 加载图像 batiment.bmp
# 问题 1a
image = cv2.imread('batiment.bmp')b) 定义要应用的滤波器 h
# 问题 1b
h = np.ones((3, 3), np.float32) / 9c) 将滤波器 h 应用于图像,并显示滤波前后的图像
# 问题 1c
filtered_image = cv2.filter2D(image, -1, h)
# 显示滤波前后的图像
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.title("原始图像")
plt.imshow(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.subplot(1, 2, 2)
plt.title("滤波后的图像")
plt.imshow(cv2.cvtColor(filtered_image, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()d) 评论低通滤波的空间效应
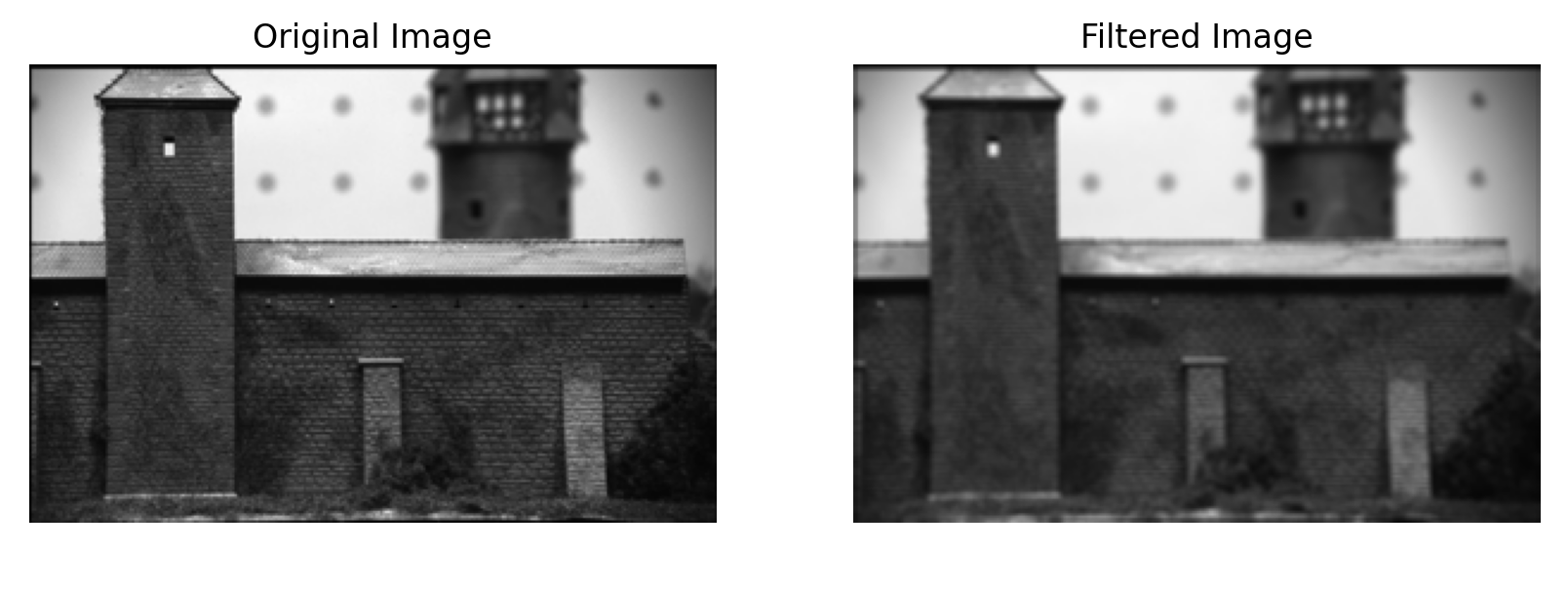
图像 3:原始图像与滤波后的图像比较
均值滤波器通过将每个像素的值与其邻域像素的值进行平均,可以消除高频噪声,如边缘或纹理细节,从而使图像更加模糊或平滑。但这也会导致细节的丢失。
2. 在频率域的效果
a) 显示滤波前后图像的傅里叶变换的模:
#%% 问题 2a
# 计算傅里叶变换的绝对值并显示
FT_I = np.log10(np.abs(np.fft.fftshift(np.fft.fft2(image[:, :, 0]))))
FT_filterI = np.log10(np.abs(np.fft.fftshift(np.fft.fft2(filtered_image[:, :, 0]))))
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.title("原始图像的傅里叶变换")
plt.imshow(FT_I, cmap='gray')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.title("滤波后图像的傅里叶变换")
plt.imshow(FT_filterI, cmap='gray')
plt.axis('off')
plt.show()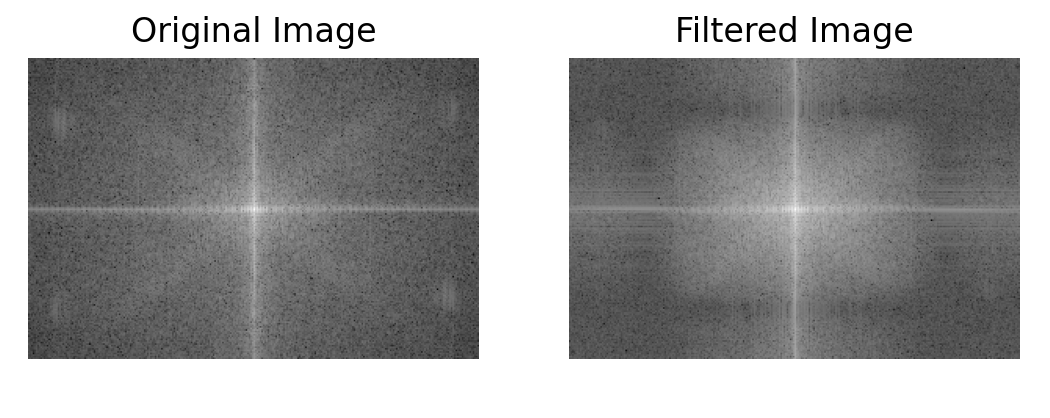
图像 4:滤波前后傅里叶变换的比较
b) 使用以下定义的函数 freqz_2 显示滤波器的频率响应:
#%% 问题 2b
def freqz_2(X, row, col):
s = X.shape
zeros_padd = np.zeros((row, col))
zeros_padd[int((row - s[0]) / 2):int(((row - s[0]) / 2) + s[0]),
int((col - s[1]) / 2):int(((col - s[1]) / 2) + s[1])] = X
freqz2_X = np.abs(np.fft.fftshift(np.fft.fft2(zeros_padd)))
return freqz2_X
filter_freq_response = freqz_2(h, image.shape[0], image.shape[1])
# 显示滤波器的频率响应
plt.figure()
plt.imshow(np.log10(filter_freq_response), cmap='gray')
plt.title("3x3 均值滤波器的频率响应")
plt.colorbar()
plt.show()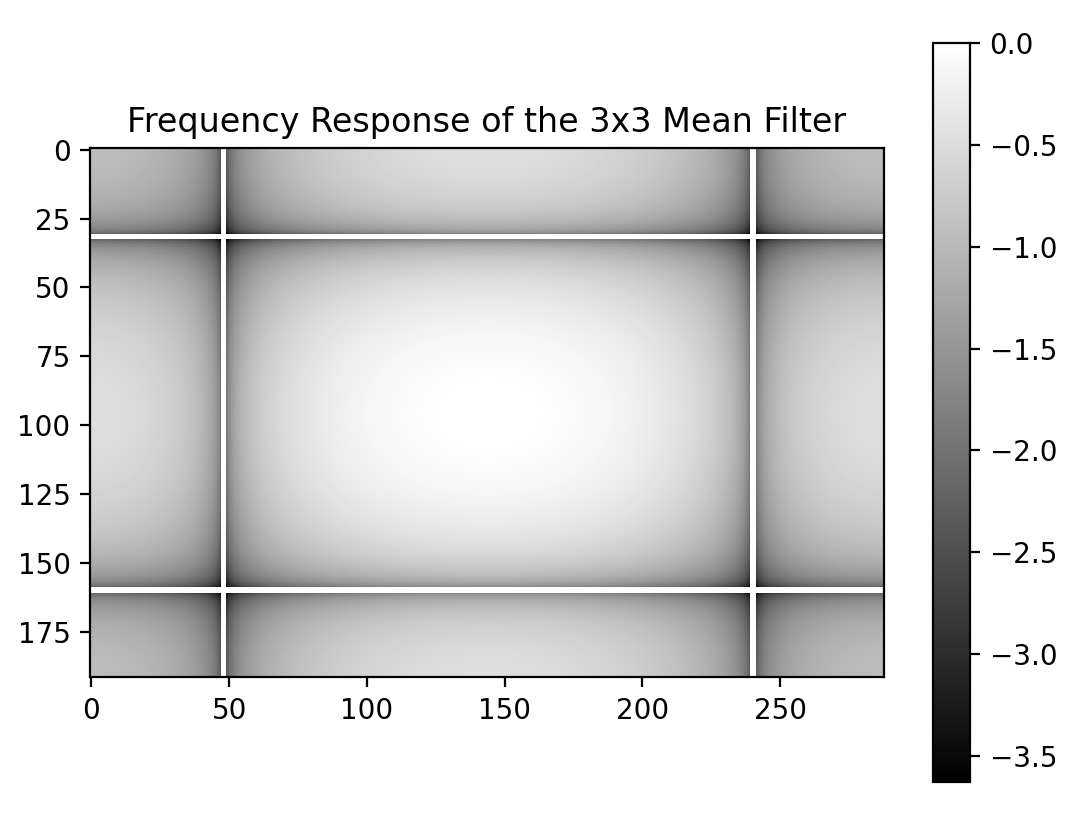
图像 5:均值滤波器的频率响应
c) 将滤波前后图像的傅里叶变换与滤波器的频率响应联系起来
在均值滤波器的频率响应中,低频部分更亮,而高频部分更暗。这表明在低通滤波后,图像的高频分量被衰减。在滤波后的图像频率域中,位于中心的低频占主导地位,而高频部分被减弱。
3. 应用于图像去噪
本部分的目标是首先在频率域中识别图像(monument.bmp)上可见的噪声模式,然后生成一个适合衰减它们的有限冲激响应(FIR)线性滤波器。
a) 加载带有高频加性噪声的图像 monument.bmp。显示噪声图像及其傅里叶变换,定位噪声的频率。
#%% 问题 3a
image_noisy = cv2.imread('monument.bmp', cv2.IMREAD_GRAYSCALE)
# 计算傅里叶变换的绝对值并显示
FT_noisy = np.log10(np.abs(np.fft.fftshift(np.fft.fft2(image_noisy))))
# 显示噪声图像及其傅里叶变换
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.title("带噪声的图像")
plt.imshow(image_noisy, cmap='gray')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.title("噪声图像的傅里叶变换")
plt.imshow(FT_noisy, cmap='gray')
plt.colorbar()
plt.axis('off')
plt.show()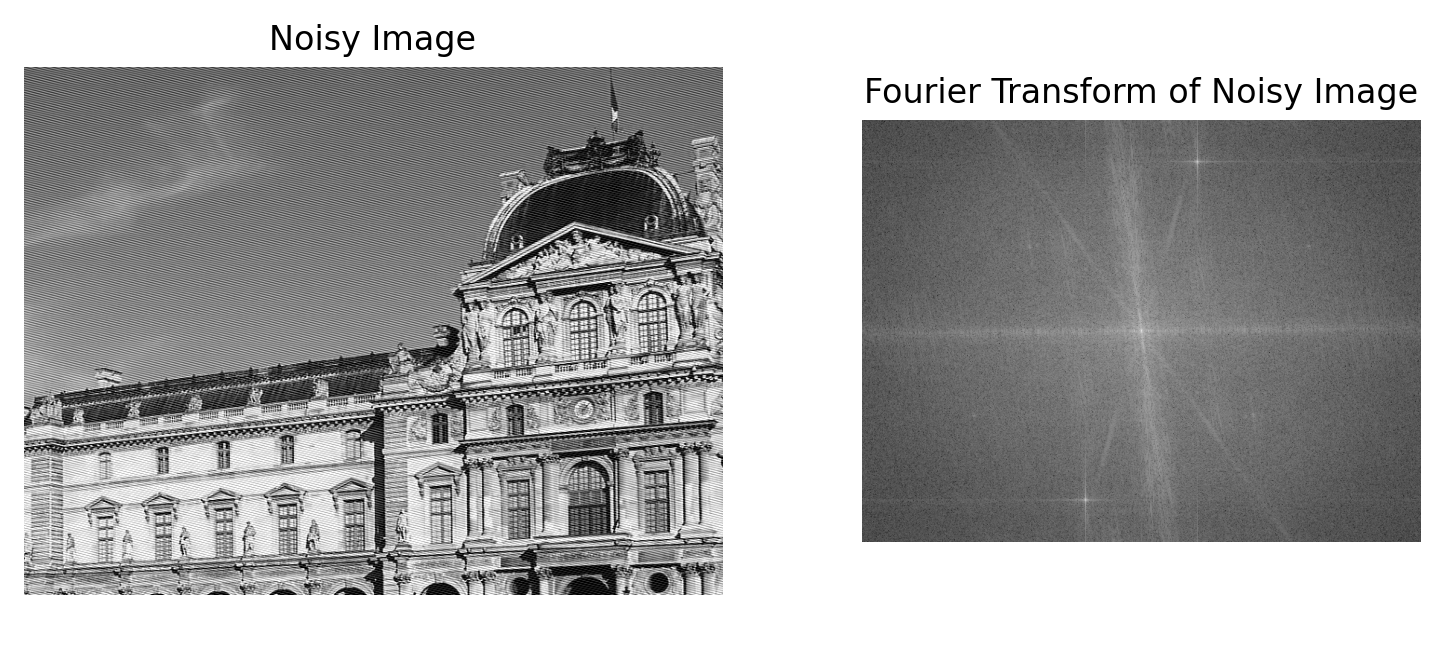
图像 6:带噪声的图像及其傅里叶变换
b) 使用低通滤波器对图像进行去噪。
可以使用的滤波器类型包括:均值滤波器(average)、圆盘滤波器(disk)、高斯滤波器(gaussian)。
对于每个滤波器,显示去噪后的图像、其傅里叶变换,以及去噪图像与噪声图像之间的差异。判断滤波是否有效。
#%% 问题 3b
# 使用不同类型的滤波器进行去噪
# 使用均值滤波器
average_filtered = cv2.blur(image_noisy, (5, 5))
# 使用圆盘滤波器(使用 OpenCV 的中值滤波作为近似)
disk_filtered = cv2.medianBlur(image_noisy, 5)
# 使用高斯滤波器
gaussian_filtered = cv2.GaussianBlur(image_noisy, (5, 5), 0)
# 显示滤波后的图像及其傅里叶变换
def plot_filtered_image_and_fft(filtered_image, filter_name):
# 计算傅里叶变换的绝对值
FT_filtered = np.log10(np.abs(np.fft.fftshift(np.fft.fft2(filtered_image))) + 1)
plt.figure(figsize=(15, 5))
plt.subplot(1, 3, 1)
plt.title(f"{filter_name} 滤波后的图像")
plt.imshow(filtered_image, cmap='gray')
plt.axis('off')
plt.subplot(1, 3, 2)
plt.title(f"{filter_name} 滤波后图像的傅里叶变换")
plt.imshow(FT_filtered, cmap='gray')
plt.colorbar()
plt.axis('off')
plt.subplot(1, 3, 3)
plt.title(f"差异(噪声 - {filter_name})")
difference = image_noisy - filtered_image
plt.imshow(difference, cmap='gray')
plt.colorbar()
plt.axis('off')
plt.tight_layout()
plt.show()
# 显示均值滤波的去噪效果
plot_filtered_image_and_fft(average_filtered, '均值')
# 显示圆盘滤波的去噪效果
plot_filtered_image_and_fft(disk_filtered, '圆盘')
# 显示高斯滤波的去噪效果
plot_filtered_image_and_fft(gaussian_filtered, '高斯')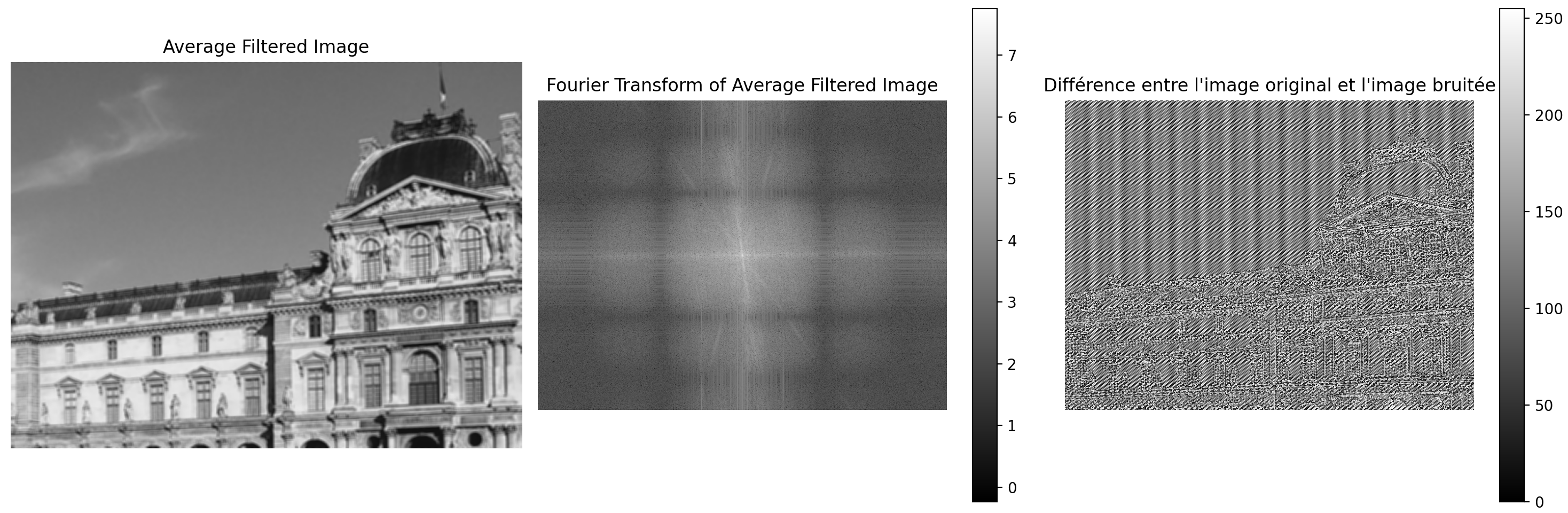
图像 7:均值滤波去噪结果
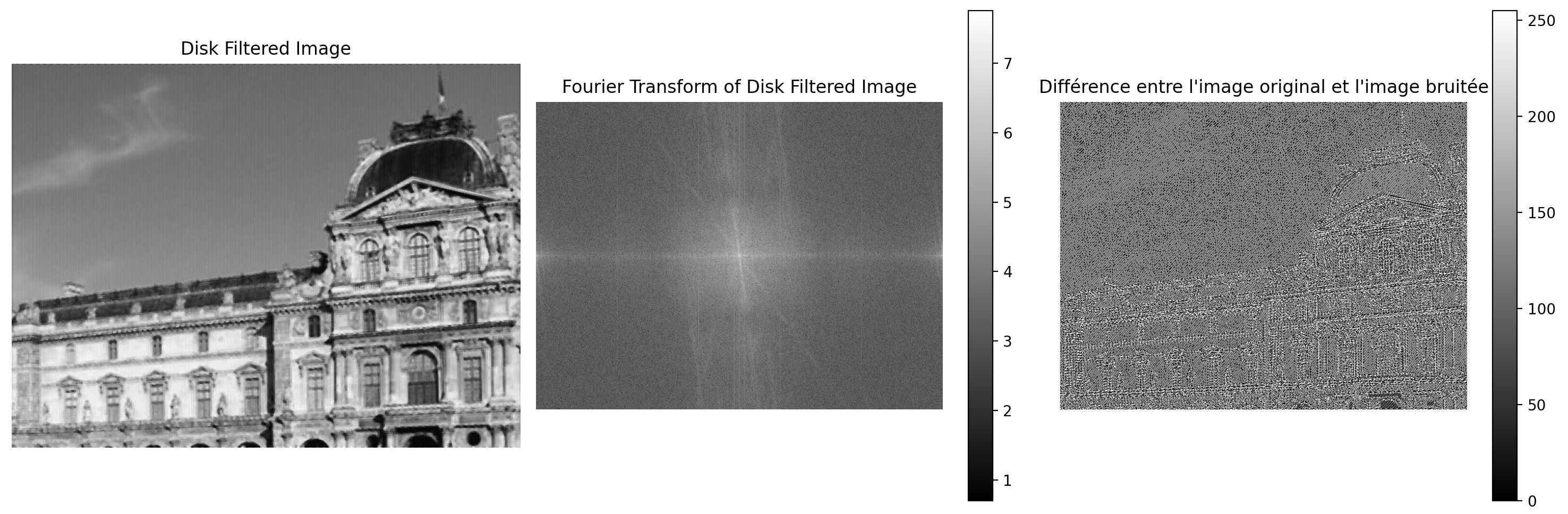
图像 8:圆盘滤波去噪结果
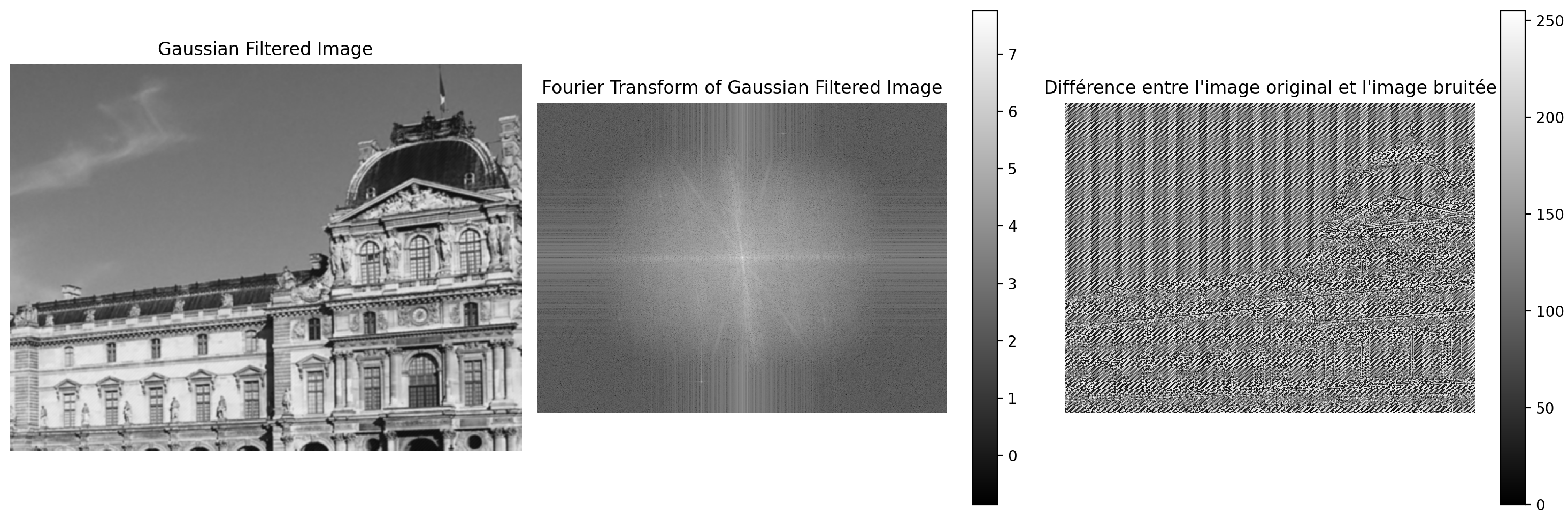
图像 9:高斯滤波去噪结果
理论上,高斯滤波器应优于均值滤波器,因为它对中心像素赋予更高的权重,逐渐减小对远处像素的影响。然而,在实际图像中,差异图像的分析表明,高斯滤波器相较于均值滤波器并没有带来显著的改进,而圆盘滤波器的去噪效果更为有效。
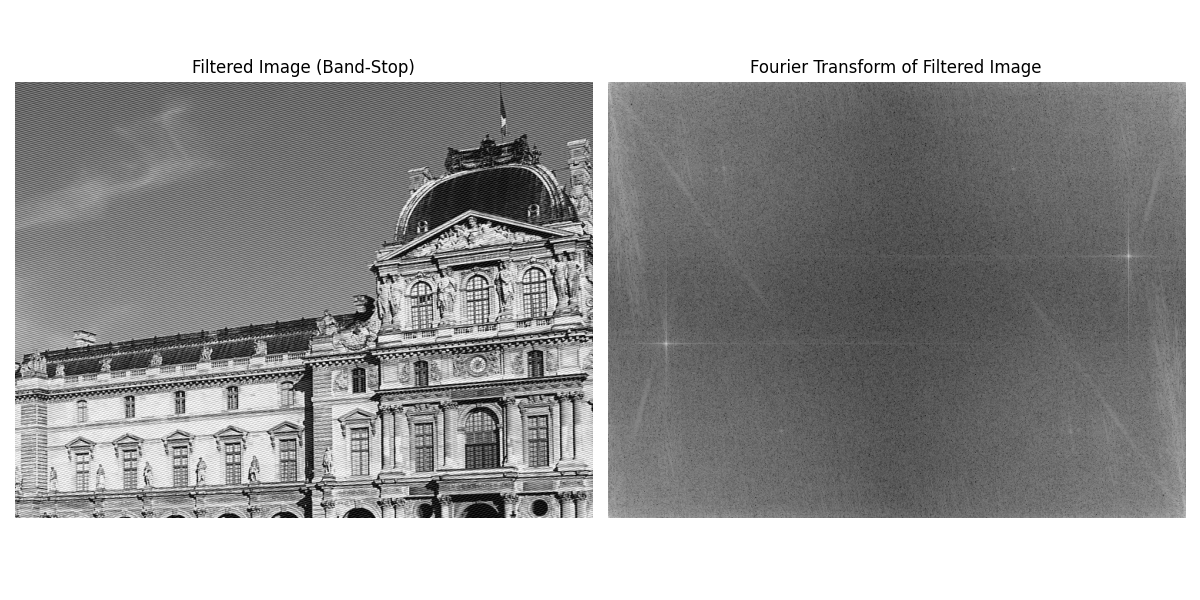
c) 我们现在设计一个高斯型“带阻”滤波器(消除特定频带的信息)。此滤波器将在空间域中构建并应用(对图像进行卷积),但其傅里叶变换将表现为带阻滤波器(在噪声频率的位置产生两个“凹陷”)。
为了在频率域中创建此带阻滤波器,我们将分三步进行:
首先创建一个低通滤波器,定义为以零为中心的二维高斯函数:
g_{\text{pbas}}(x, y) = \frac{1}{2\pi\sigma^2} \exp\left(-\frac{x^2 + y^2}{2\sigma^2}\right)在频率域中,高斯函数的方差为 \sigma,其傅里叶变换也是一个方差为 1/\sigma 的高斯函数。
然后,通过一个正弦信号对其进行调制,使其中心位于噪声的频率上,从而创建一个带通滤波器:
g_{\text{pbande}}(x, y) = g_{\text{pbas}} \cdot 2 \cdot \cos\left(2\pi(f_x x + f_y y)\right)在空间域中乘以一个余弦函数,相当于在频率域中将 g_{\text{pbas}} 的傅里叶变换与余弦函数的傅里叶变换(即在噪声频率处的两个狄拉克函数)进行卷积。
最后,将此滤波器转换为频率域中的带阻滤波器:
g_{\text{cbande}} = \delta - g_{\text{pbande}}对于中心为零的狄拉克函数(矩阵中心值为 1,其他元素为 0),其傅里叶变换在频率域中处处为 1。因此,带阻滤波器的频率响应为:
G_{\text{cbande}} = 1 - G_{\text{pbande}}
要求完成的任务:
在每个步骤中构建滤波器,并在空间域和频率域中可视化其效果。
评论将最终滤波器应用于带噪声图像的效果,特别是不同参数的影响。
#%% 问题 3c
image_path = 'monument.bmp'
image_noisy = cv2.imread(image_path, cv2.IMREAD_GRAYSCALE)
if image_noisy is None:
raise ValueError("图像无法读取,请检查文件路径")
rows, cols = image_noisy.shape
x_center, y_center = cols // 2, rows // 2
sigma = 100
fx, fy = 30, 30
# 构建空间域坐标, 以图像中心为原点
x = np.arange(cols) - x_center
y = np.arange(rows) - y_center
X, Y = np.meshgrid(x, y)
# 1) 构建高斯低通滤波器 g_pbas(x,y)
g_pbas = (1/(2*np.pi*sigma**2)) * np.exp(-(X**2 + Y**2)/(2*sigma**2))
# 2) 构建带通滤波器 g_pbande(x,y)
g_pbande = g_pbas * 2 * np.cos(2*np.pi*(fx*X/cols + fy*Y/rows))
# 3) 构建带阻滤波器 g_cbande(x,y)
delta = np.zeros_like(g_pbande)
# 在中心点处为1,即 δ(y_center, x_center)=1
delta[y_center, x_center] = 1
g_cbande = delta - g_pbande
# ---- 关键修改部分开始 ----
# 将滤波器从中心对齐转换为左上角对齐,以便后续的 FFT 与卷积正确对应
g_cbande_for_fft = np.fft.ifftshift(g_cbande)
# ---- 关键修改部分结束 ----
# 计算滤波器频域特性
F_g_cbande = np.fft.fft2(g_cbande_for_fft)
# 对带噪声图像进行FFT(无需 shift)
FT_noisy = np.fft.fft2(image_noisy)
# 在频域中进行滤波
FT_filtered = FT_noisy * F_g_cbande
# 逆变换回空间域
filtered_image = np.fft.ifft2(FT_filtered)
filtered_image = np.abs(filtered_image)
# 显示结果
plt.figure(figsize=(12,6))
plt.subplot(1, 2, 1)
plt.title("Filtered Image (Band-Stop)")
plt.imshow(filtered_image, cmap='gray')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.title("Fourier Transform of Filtered Image")
plt.imshow(np.log10(np.abs(FT_filtered)+1), cmap='gray')
plt.colorbar()
plt.axis('off')
plt.tight_layout()
plt.show()注:由于噪声频率需要根据傅里叶变换图像手动调整,因此 fx 和 fy 的值可能需要根据实际情况修改。
关于 \sigma 的选择:
标准差 \sigma 决定了高斯滤波器的宽度,σ 的选择需兼顾噪声频带与原图像频谱成分的分布:
若 σ 太小,高斯低通会很窄,带通或带阻对频率敏感度高,但无法完全覆盖噪声带宽。
若 σ 太大,高斯低通会变得过宽,带阻滤波不够精准,破坏原有图像细节。
要确保不违反 Shannon 采样定理(即不去滤除在有效可表示频带内的有效成分)
滤波效果:
通过在空间域中构建带阻滤波器,可以在频率域中有效地抑制特定频率的噪声,从而改善图像的质量。
高通滤波与对比度增强
目标: 在图像上应用卷积型高通滤波器,并观察其效果
1. 拉普拉斯滤波器
拉普拉斯算子的二维卷积掩码可表示为:
a) 将此滤波器应用于图像并观察其空间效果。
#%% 问题 1a
# 定义拉普拉斯滤波器
laplacian_filter = np.array([[0, 1, 0],
[1, -4, 1],
[0, 1, 0]])
# 应用卷积操作
filtered_image = cv2.filter2D(image_noisy, -1, laplacian_filter)
# 显示原始图像和滤波后的图像
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.title("原始图像")
plt.imshow(image_noisy, cmap='gray')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.title("拉普拉斯滤波后的图像")
plt.imshow(filtered_image, cmap='gray')
plt.axis('off')
plt.tight_layout()
plt.show()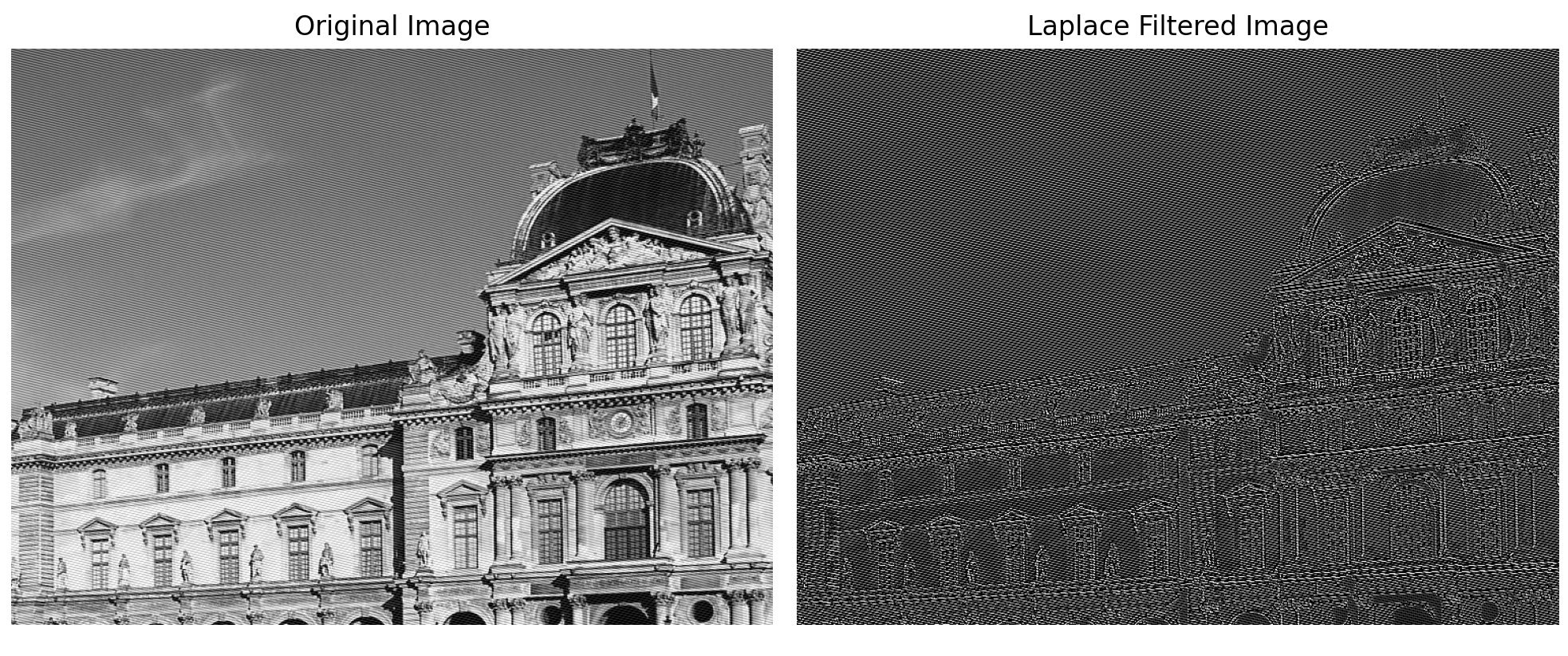
图像 10:拉普拉斯滤波效果
b) 显示输入和输出图像的傅里叶变换。
# 问题 1b
# 计算傅里叶变换的绝对值并显示
FT_original = np.log10(np.abs(np.fft.fftshift(np.fft.fft2(image_noisy))) + 1)
FT_filtered = np.log10(np.abs(np.fft.fftshift(np.fft.fft2(filtered_image))) + 1)
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.title("原始图像的傅里叶变换")
plt.imshow(FT_original, cmap='gray')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.title("滤波后图像的傅里叶变换")
plt.imshow(FT_filtered, cmap='gray')
plt.axis('off')
plt.show()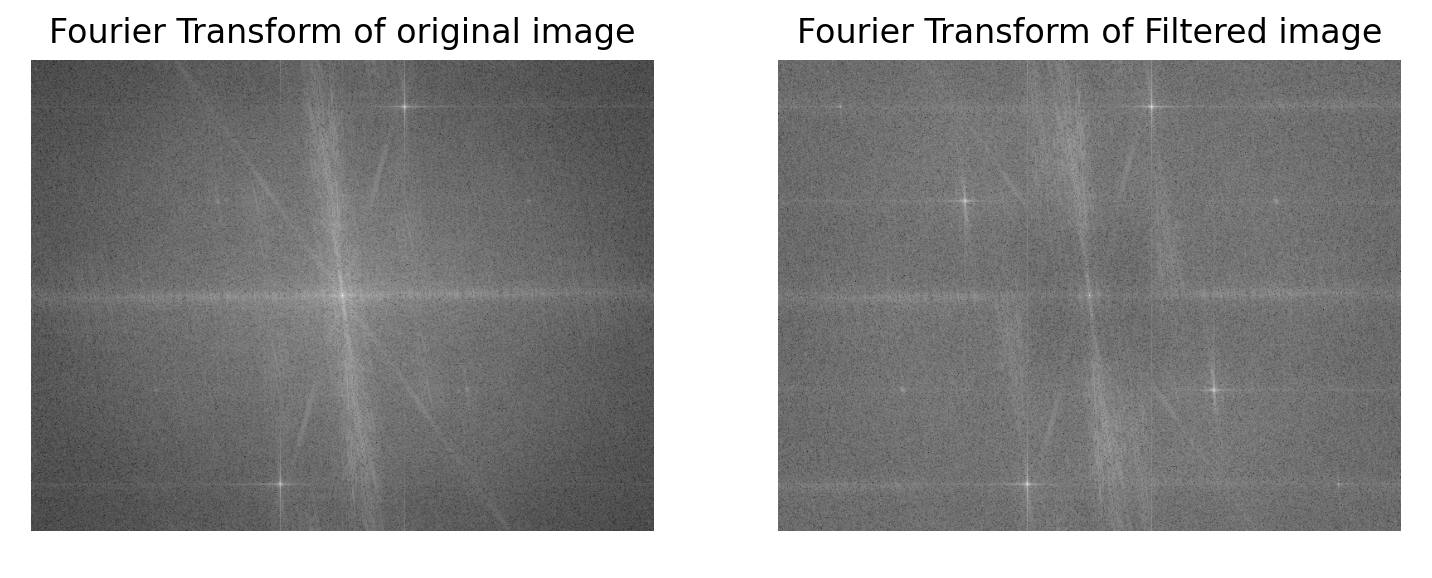
图像 11:拉普拉斯滤波前后的傅里叶变换
从数学公式的角度来看,中心系数为 -4,这意味着对中心像素应用了一个负权重,而对周围像素应用了正权重。因此,它可以检测图像中像素值的变化,即边缘的位置。
从结果来看,拉普拉斯滤波器主要关注图像的边缘(像素快速变化的地方)。应用拉普拉斯滤波器后,图像的边缘被显著增强(非常清晰),而平滑区域变得更暗。
我们可以使用拉普拉斯滤波器来提取图像的边缘。
2. 应用于对比度增强
a) 将掩码 L 应用于图像 moon.tif,然后根据以下公式从原始图像中减去结果:
其中 \alpha 是一个调整参数,可以任意设置为正值,例如 1。
观察不同 \alpha 值(例如 0、1、2、-0.25)下的结果。
#%% 问题 2a
# 加载图像
image_moon = cv2.imread('moon.tif', cv2.IMREAD_GRAYSCALE)
# 应用拉普拉斯滤波器
laplacian_result = cv2.filter2D(image_moon, -1, laplacian_filter)
# 对比度增强
alpha_values = [0, 1, 2, -0.25]
plt.figure(figsize=(15, 6))
for i, alpha in enumerate(alpha_values):
image_moon_enhance = cv2.addWeighted(image_moon, 1, laplacian_result, -alpha, 0)
plt.subplot(1, len(alpha_values), i + 1)
plt.title(f'alpha = {alpha}')
plt.imshow(image_moon_enhance, cmap='gray')
plt.axis('off')
plt.tight_layout()
plt.show()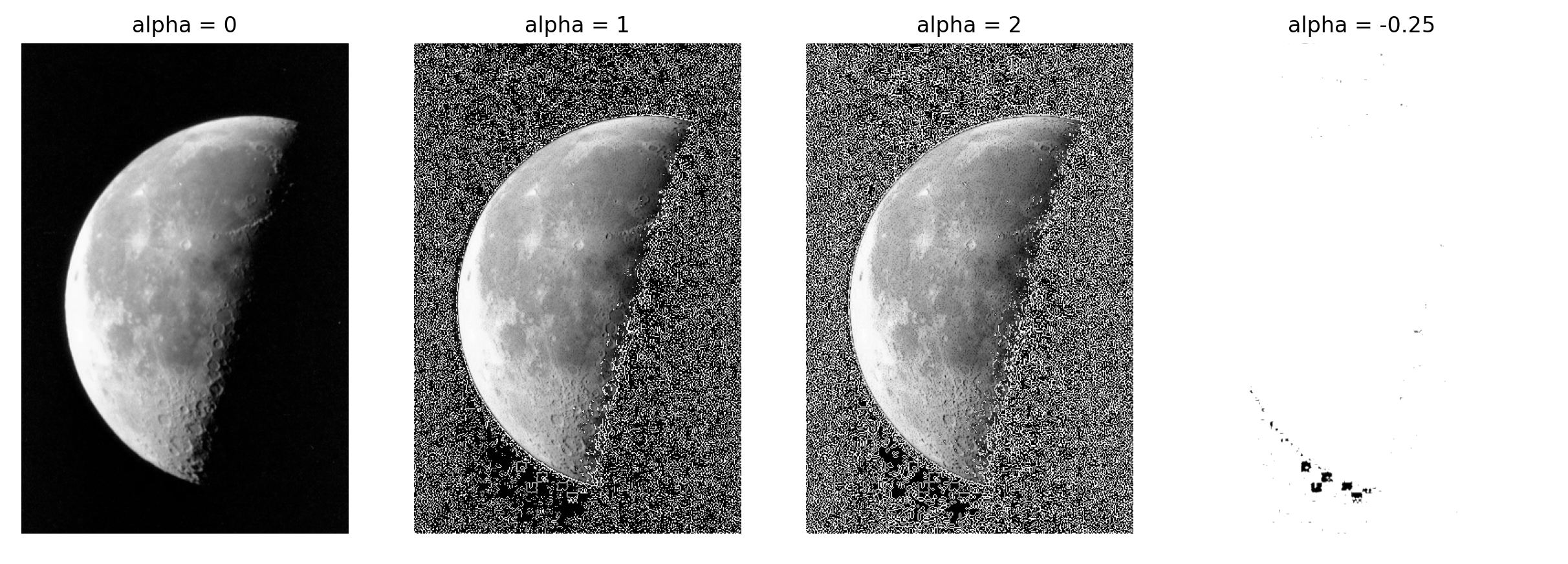
图像 12:不同 α 值下的对比度增强
b) 从空间域和频率域的角度解释为什么能增强图像的边缘。
从空间域的角度:
拉普拉斯算子是一个二阶微分算子,能够检测图像中变化迅速的区域(即边缘)。
公式 K(x, y) = I(x, y) - \alpha J(x, y) 是对比度增强的关键公式。通过选择不同的调整参数 \alpha,可以获得对边缘的不同效果。
当 \alpha > 0 时,边缘被增强,图像的对比度提高。
当 \alpha < 0 时,边缘被削弱,图像变得模糊或平滑。
当 \alpha = 0 时,图像不发生变化。
从频率域的角度:
拉普拉斯滤波器相当于一个高通滤波器,因为它增强了高频分量,从而改善了图像的边缘。
第三部分 颜色分割
目标: 对彩色图像进行 RGB 或 YCbCr 分割,并更换图像的背景。
在 RGB 空间中的分割
a) 加载图像 homme_green.png。分别显示图像的 3 个 RGB 通道。
#%% 练习 3 - 问题 1a
image = cv2.imread('homme_green.png')
image_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
R, G, B = image_rgb[:, :, 0], image_rgb[:, :, 1], image_rgb[:, :, 2]
# 显示 RGB 通道
plt.figure(figsize=(12, 4))
plt.subplot(1, 3, 1)
plt.title('红色通道')
plt.imshow(R, cmap='gray')
plt.axis('off')
plt.subplot(1, 3, 2)
plt.title('绿色通道')
plt.imshow(G, cmap='gray')
plt.axis('off')
plt.subplot(1, 3, 3)
plt.title('蓝色通道')
plt.imshow(B, cmap='gray')
plt.axis('off')
plt.tight_layout()
plt.show()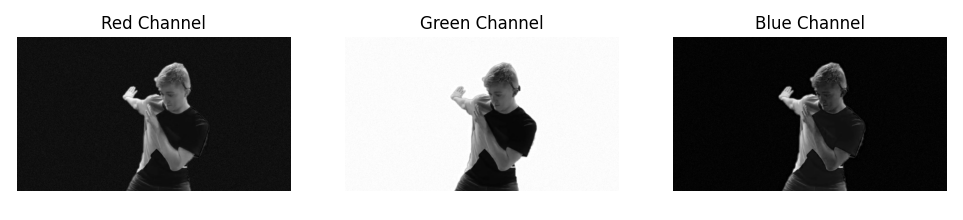
图 13:RGB 通道的分离
b) 对于每个通道,确定一个包含所有绿色背景像素的区间 ( [R{\text{min}}, R{\text{max}}] )。通过计算仅包含背景部分的图像的每个颜色分量的直方图,验证所选的区间。
#%% 问题 1b
# 显示每个通道的直方图
plt.figure(figsize=(12, 4))
plt.subplot(1, 3, 1)
plt.title('红色通道直方图')
plt.hist(R.ravel(), bins=256, color='red')
plt.xlabel('像素值')
plt.ylabel('频率')
plt.subplot(1, 3, 2)
plt.title('绿色通道直方图')
plt.hist(G.ravel(), bins=256, color='green')
plt.xlabel('像素值')
plt.ylabel('频率')
plt.subplot(1, 3, 3)
plt.title('蓝色通道直方图')
plt.hist(B.ravel(), bins=256, color='blue')
plt.xlabel('像素值')
plt.tight_layout()
plt.show()
# 创建一个掩码来分离背景
mask = (R >= 0) & (R <= 50) & (G >= 220) & (G <= 256) & (B >= 0) & (B <= 50)
R_segmented = image[:, :, 0] * mask
G_segmented = image[:, :, 1] * mask
B_segmented = image[:, :, 2] * mask
image_segmented = cv2.merge((B_segmented, G_segmented, R_segmented))
# 显示分割后的图像
plt.figure()
plt.title('RGB 空间中的分割图像')
plt.imshow(image_segmented)
plt.axis('off')
plt.show()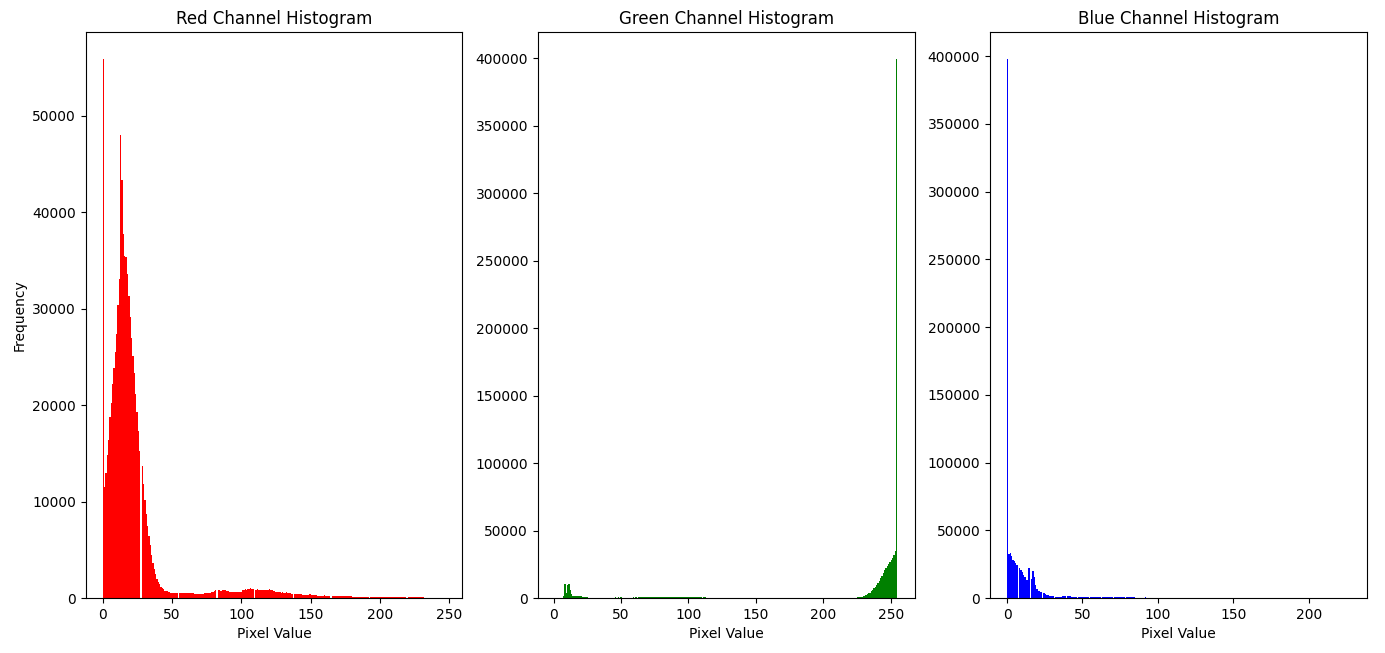
图像 14:RGB 通道的直方图
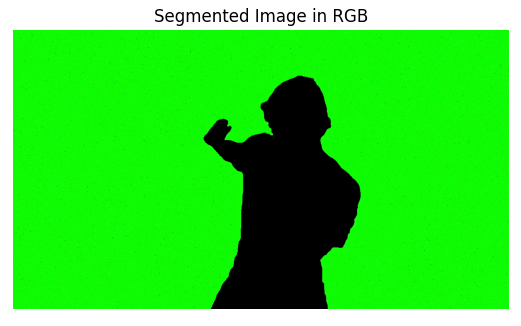
图像 15:RGB 空间中的分割结果
通过观察 RGB 通道的直方图,可以有效地确定绿色背景像素的范围,并使用这些范围进行颜色分割。选择的阈值确保了大多数绿色背景的像素被正确识别,同时将对前景人物的影响最小化。但是,背景中仍有一些黑点。通过调整适当的阈值,能够获得更好的结果。
在 YCbCr 空间中的分割
a) 将 RGB 图像转换为 YCbCr 图像,并显示其不同的分量。
#%% 问题 2a
# 将 RGB 图像转换为 YCbCr
image_ycbcr = cv2.cvtColor(image_rgb, cv2.COLOR_RGB2YCrCb)
# 分离 Y、Cb、Cr 通道
Y, Cb, Cr = image_ycbcr[:, :, 0], image_ycbcr[:, :, 1], image_ycbcr[:, :, 2]
# 创建一个 2 行 3 列的子图布局
fig, axes = plt.subplots(2, 3, figsize=(12, 8))
# 显示 Y、Cb、Cr 通道
axes[0, 0].set_title('Y 通道')
axes[0, 0].imshow(Y, cmap='gray')
axes[0, 0].axis('off')
axes[0, 1].set_title('Cb 通道')
axes[0, 1].imshow(Cb, cmap='gray')
axes[0, 1].axis('off')
axes[0, 2].set_title('Cr 通道')
axes[0, 2].imshow(Cr, cmap='gray')
axes[0, 2].axis('off')
# 显示每个通道的直方图
axes[1, 0].set_title('Y 通道直方图')
axes[1, 0].hist(Y.ravel(), bins=256, color='blue')
axes[1, 0].set_xlabel('像素值')
axes[1, 0].set_ylabel('频率')
axes[1, 1].set_title('Cb 通道直方图')
axes[1, 1].hist(Cb.ravel(), bins=256, color='red')
axes[1, 1].set_xlabel('像素值')
axes[1, 1].set_ylabel('频率')
axes[1, 2].set_title('Cr 通道直方图')
axes[1, 2].hist(Cr.ravel(), bins=256, color='green')
axes[1, 2].set_xlabel('像素值')
axes[1, 2].set_ylabel('频率')
plt.tight_layout()
plt.show()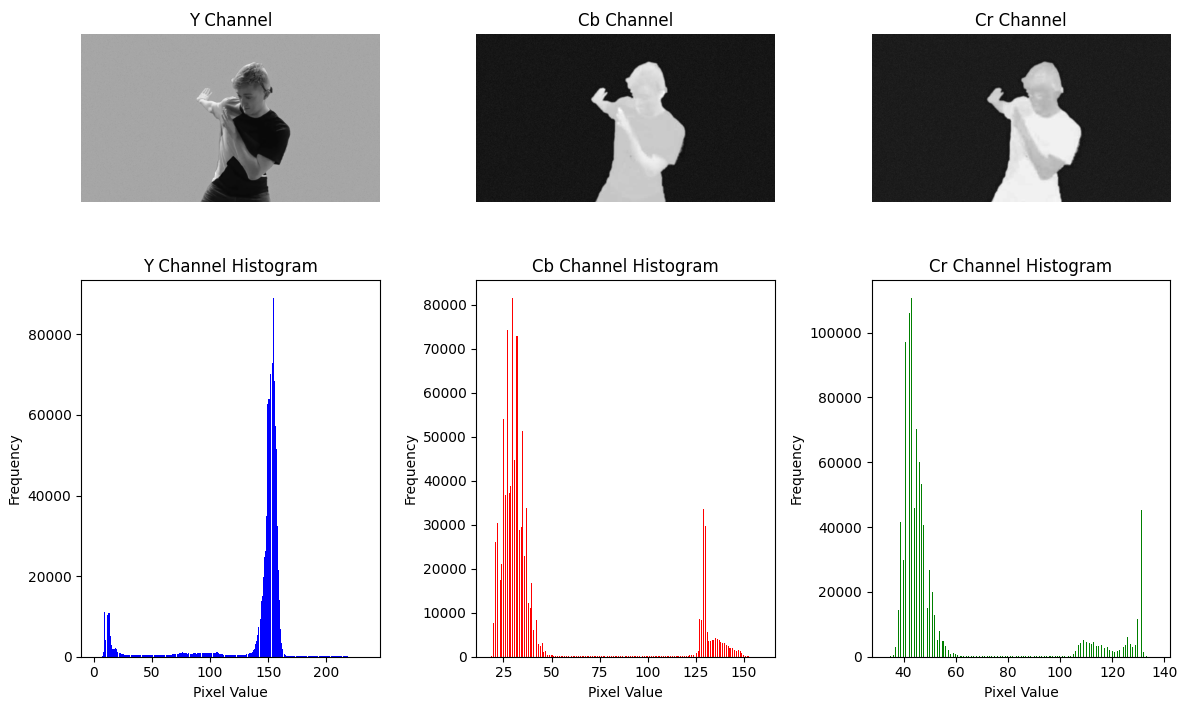
图像 16:YCbCr 通道及其直方图
b) 对背景进行分割
#%% 问题 2b
# 使用 YCbCr 空间进行背景分割
mask = ((Cb >= 15) & (Cb <= 50)) & ((Cr >= 35) & (Cr <= 60))
Y_segmented = Y * mask
Cb_segmented = Cb * mask
Cr_segmented = Cr * mask
image_background = cv2.merge((Y_segmented, Cb_segmented, Cr_segmented))
# 显示分割后的背景图像
plt.figure()
plt.title('YCbCr 空间中的分割图像')
plt.imshow(image_background)
plt.axis('off')
plt.show()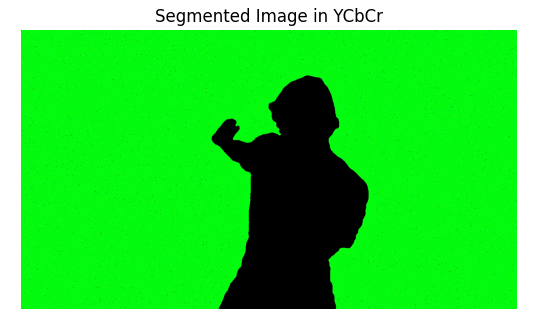
图像 17:YCbCr 空间中的分割结果
与 RGB 空间相比,YCbCr 空间将亮度信息(Y)与色度信息(Cb、Cr)分离,这使得颜色分割更加精确。在复杂的光照条件下,YCbCr 空间中的分割可以减少光照对颜色分布的影响,从而改善分割效果。
色度键合成
a) 使用之前计算的掩码作为权重,将分割的背景替换为另一幅背景图像(montagne.png)。
#%% 问题 3a
# 读取原始图像和新的背景图像
image = cv2.imread('homme_green.png')
new_background = cv2.imread('montagne.png')
# 确保尺寸一致
new_background = cv2.resize(new_background, (image.shape[1], image.shape[0]))
# 将新的背景图像转换为 YCbCr
new_background_ycbcr = cv2.cvtColor(new_background, cv2.COLOR_BGR2YCrCb)
Y_bg, Cb_bg, Cr_bg = new_background_ycbcr[:, :, 0], new_background_ycbcr[:, :, 1], new_background_ycbcr[:, :, 2]
# 反转掩码以分离前景
mask_inv = 1 - mask
# 分离前景
Y_segmented = Y * mask_inv
Cb_segmented = Cb * mask_inv
Cr_segmented = Cr * mask_inv
image_foreground = cv2.merge((Y_segmented, Cb_segmented, Cr_segmented))
# 分离背景
Y_background = Y_bg * mask
Cb_background = Cb_bg * mask
Cr_background = Cr_bg * mask
background = cv2.merge((Y_background, Cb_background, Cr_background))
# 合并前景和背景
final_image_ycbcr = image_foreground + background
# 转换回 BGR 色彩空间
final_image_ycbcr = final_image_ycbcr.astype('uint8')
final_result = cv2.cvtColor(final_image_ycbcr, cv2.COLOR_YCrCb2BGR)
# 显示色度键合成后的图像
plt.figure(figsize=(8, 6))
plt.title('色度键合成结果')
plt.imshow(cv2.cvtColor(final_result, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()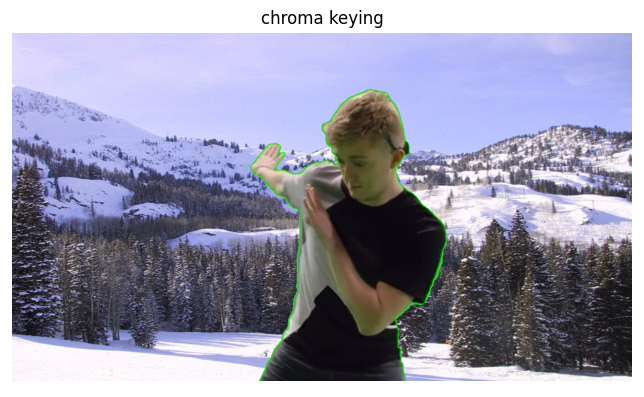
图像 18:替换背景后的图像
我们成功地将绿色背景替换为新的背景图像。色度键合成技术利用了色彩空间中分离的色度信息,确保前景人物的颜色不受新背景的影响,从而实现了背景替换的效果。
斑点检测
a) 对图像 mocap.jpg 的亮度进行阈值处理,分割饱和的白色斑点:
#%% 问题 4a
# 读取动作捕捉图像
image_mocap = cv2.imread('mocap.jpg')
# 转换为 YCbCr 色彩空间
image_ycbcr_mocap = cv2.cvtColor(image_mocap, cv2.COLOR_BGR2YCrCb)
Y_channel_mocap = image_ycbcr_mocap[:, :, 0]
# 通过阈值分割来检测饱和的白色斑点
_, M = cv2.threshold(Y_channel_mocap, 250, 255, cv2.THRESH_BINARY)
plt.figure()
plt.title('二值掩码(Y > 250)')
plt.imshow(M, cmap='gray')
plt.axis('off')
plt.show()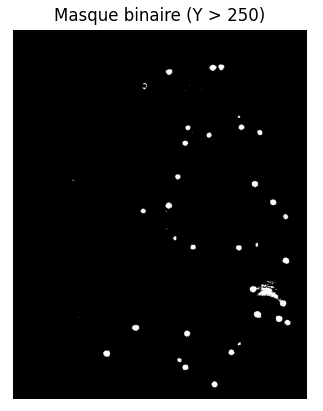
图像 19:亮点的二值掩码
我们得到了一幅二值图像,其中亮度大于 250 的像素被标记为 255(白色),其他像素为 0(黑色),从而有效地分割了饱和的白色斑点。
b) 使用 connectedComponents 函数对获得的二值图像进行连通区域的标记。然后,使用调色板显示标记的图像,突出显示不同连通区域的编号,即为每个连通区域分配不同的颜色。
#%% 问题 4b
# 连通区域标记
num_labels, labels_im = cv2.connectedComponents(M.astype(np.uint8), connectivity=8)
# 确认标签图像的大小
print("图像大小:", image_mocap.shape[:2])
print("标签图像大小:", labels_im.shape)
# 创建彩色标签图像
label_hue = np.uint8(179 * labels_im / np.max(labels_im))
blank_ch = 255 * np.ones_like(label_hue)
labeled_img = cv2.merge([label_hue, blank_ch, blank_ch])
labeled_img = cv2.cvtColor(labeled_img, cv2.COLOR_HSV2RGB)
labeled_img[label_hue == 0] = 0 # 将背景设为黑色
# 显示标记的图像
plt.figure()
plt.title("连通区域标记的图像")
plt.imshow(labeled_img)
plt.axis('off')
plt.show()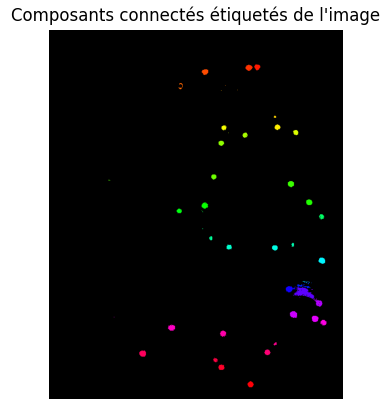
图像 20:连通区域标记的结果
c) 将检测到的斑点叠加在原始图像上。
#%% 问题 4c
# 创建叠加图像
overlay = image_mocap.copy()
# 为每个连通区域(除背景标签 0 外)分配随机颜色
colors = []
for i in range(1, num_labels):
colors.append(np.random.randint(0, 255, 3))
# 将颜色应用于每个连通区域
for label in range(1, num_labels):
overlay[labels_im == label] = colors[label - 1]
# 将标签图像叠加在原始图像上
alpha = 0.5 # 透明度
result = cv2.addWeighted(image_mocap, 1 - alpha, overlay, alpha, 0)
# 显示叠加后的图像
plt.figure()
plt.title("检测到的斑点叠加在原始图像上")
plt.imshow(cv2.cvtColor(result, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()
图像 21:检测到的亮点叠加在原始图像上
通过应用阈值分割和连通区域标记,我们将标记的图像叠加在原始图像上,调整透明度参数 \alpha 来控制权重。
第四部分 图像的几何变换
目标: 应用不同的插值方法对图像进行过采样,以观察它们对图像质量和频域特性的影响。
过采样 / 插值
a) 从图像 lena256.png 中提取眼睛区域(ymin:ymax=120:149, xmin:xmax=120:149),使用最近邻、双线性和双三次插值方法将其放大 5 倍。
#%% 问题 1a
# 加载图像
img = cv2.imread('lena256.png')
# 转换为 RGB 格式以便显示(OpenCV 默认使用 BGR)
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 提取眼睛区域
x_min, x_max = 120, 149
y_min, y_max = 120, 149
eye_region = img_rgb[y_min:y_max, x_min:x_max]
# 定义新尺寸(放大 5 倍)
scale_factor = 5
new_size = (eye_region.shape[1] * scale_factor, eye_region.shape[0] * scale_factor)
# 应用不同的插值方法
eye_nearest = cv2.resize(eye_region, new_size, interpolation=cv2.INTER_NEAREST)
eye_bilinear = cv2.resize(eye_region, new_size, interpolation=cv2.INTER_LINEAR)
eye_bicubic = cv2.resize(eye_region, new_size, interpolation=cv2.INTER_CUBIC)
# 显示原始和插值后的图像以进行比较
fig, axs = plt.subplots(1, 4, figsize=(16, 4))
axs[0].imshow(eye_region)
axs[0].set_title('原始图像')
axs[0].axis('off')
axs[1].imshow(eye_nearest)
axs[1].set_title('最近邻插值')
axs[1].axis('off')
axs[2].imshow(eye_bilinear)
axs[2].set_title('双线性插值')
axs[2].axis('off')
axs[3].imshow(eye_bicubic)
axs[3].set_title('双三次插值')
axs[3].axis('off')
plt.tight_layout()
plt.show()
图像 22:插值方法的比较
最近邻插值为每个新像素分配最接近的现有像素的值,这会导致锯齿状边缘和细节的丢失。双线性插值使用最接近的 4 个像素的加权平均值,这使过渡更平滑,减少了块效应。双三次插值使用 16 个相邻像素进行更精确的估计,保留更多细节,生成更平滑的图像。
b) 显示每个图像的水平轮廓线。
#%% 问题 1b
# 选择水平中心线
row = eye_region.shape[0] // 2
# 获取放大图像中该行的像素值
original_profile = eye_region[row, :, :]
nearest_profile = eye_nearest[row * scale_factor, :, :]
bilinear_profile = eye_bilinear[row * scale_factor, :, :]
bicubic_profile = eye_bicubic[row * scale_factor, :, :]
# 绘制颜色通道的值,并在一张图上显示所有方法
colors = ['红色通道', '绿色通道', '蓝色通道']
for i in range(3):
plt.figure(figsize=(10, 6))
plt.plot(original_profile[:, i], label='原始', linewidth=2)
plt.plot(nearest_profile[:, i], label='最近邻', linestyle='--')
plt.plot(bilinear_profile[:, i], label='双线性', linestyle='-.')
plt.plot(bicubic_profile[:, i], label='双三次', linestyle=':')
plt.title(f'{colors[i]} - 水平轮廓线比较')
plt.legend()
plt.xlabel('像素位置')
plt.ylabel('像素值')
plt.show()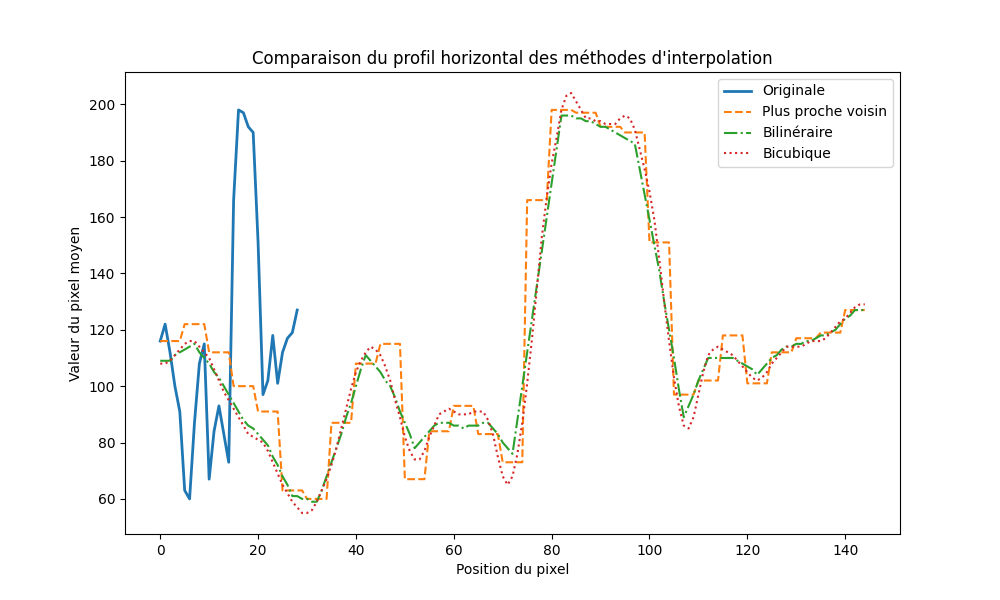
图 23:不同插值方法的水平轮廓线
c) 显示图像的傅里叶变换,并与初始图像进行比较。
#%% 问题 1c
def compute_fft(image):
# 将图像转换为灰度
gray = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
# 计算傅里叶变换
f = np.fft.fft2(gray)
fshift = np.fft.fftshift(f)
magnitude_spectrum = 20 * np.log(np.abs(fshift) + 1) # 加 1 以避免 log(0)
return magnitude_spectrum
# 计算傅里叶变换
fft_original = compute_fft(eye_region)
fft_nearest = compute_fft(eye_nearest)
fft_bilinear = compute_fft(eye_bilinear)
fft_bicubic = compute_fft(eye_bicubic)
# 显示傅里叶变换以进行比较
fig, axs = plt.subplots(2, 2, figsize=(12, 10))
axs[0, 0].imshow(fft_original, cmap='gray')
axs[0, 0].set_title('原始图像的傅里叶变换')
axs[0, 0].axis('off')
axs[0, 1].imshow(fft_nearest, cmap='gray')
axs[0, 1].set_title('最近邻插值的傅里叶变换')
axs[0, 1].axis('off')
axs[1, 0].imshow(fft_bilinear, cmap='gray')
axs[1, 0].set_title('双线性插值的傅里叶变换')
axs[1, 0].axis('off')
axs[1, 1].imshow(fft_bicubic, cmap='gray')
axs[1, 1].set_title('双三次插值的傅里叶变换')
axs[1, 1].axis('off')
plt.tight_layout()
plt.show()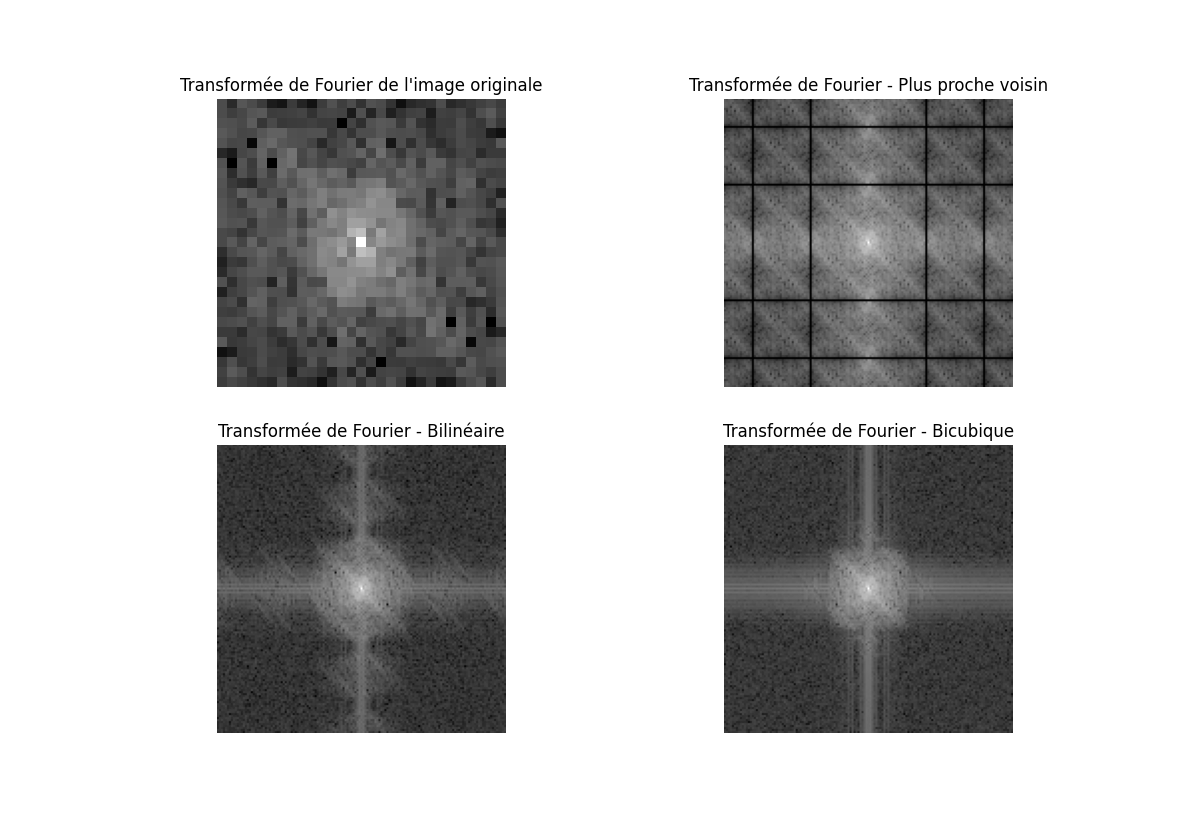
图 24:傅里叶变换的比较
最近邻插值由于在图像中产生的不连续性,会在频域中导致伪影和谐波的出现。双线性插值通过平滑过渡来减少这些效果,这在傅里叶变换中表现为高频分量的衰减。双三次插值在频域中最能保留原始图像的特征,频域中的失真较少。
图像变换
目标: 操作不同的几何变换模型,并将这些变换应用于图像。
笛卡尔 - 极坐标变换
我们希望将全向图像 omni.png 转换为全景图像,即将图像的内容转换为极坐标表示。
a) 加载包含全向图像的 omni.png,并将图像转换为灰度以简化处理。计算图像中心的坐标 x_0, y_0。
#%% 问题 2a
# 加载全向图像并转换为灰度
omni = cv2.imread('omni.png', cv2.IMREAD_GRAYSCALE)
# 获取图像的尺寸
height, width = omni.shape
x0, y0 = width // 2, height // 2
print(f"图像中心:({x0}, {y0})")b) 使用 meshgrid 函数创建两个矩阵 X2 和 Y2,表示大小为 360×200 的目标图像的坐标。将 X2 解释为角度(在 0 到 360 度之间),Y2 解释为相对于中心 x_0, y_0 的半径。然后计算源图像中的对应坐标 (X1, Y1)。
#%% 问题 2b
# 定义目标图像的大小
theta_max, r_max = 360, 200
theta, r = np.meshgrid(np.linspace(0, 2 * np.pi, theta_max),
np.linspace(0, r_max, r_max))
# 计算源图像中的对应坐标
X1 = x0 + r * np.cos(theta)
Y1 = y0 + r * np.sin(theta)c) 对先前计算的 (X1, Y1) 位置进行插值,并显示结果图像。绘制一个解释性示意图,说明此变换的原理,特别是解释直接/逆变换的概念。
#%% 问题 2c
from scipy.ndimage import map_coordinates
# 将坐标展平为 1D 向量
X1_flat = X1.flatten()
Y1_flat = Y1.flatten()
# 双线性插值
omni_polar = map_coordinates(omni, [Y1_flat, X1_flat], order=1, mode='constant', cval=0)
# 重塑为目标图像的大小
omni_polar = omni_polar.reshape((r_max, theta_max))
# 显示结果
plt.figure(figsize=(8, 6))
plt.imshow(omni_polar, cmap='gray', extent=(0, 360, 0, r_max))
plt.title('灰度全景图像(极坐标变换)')
plt.xlabel('角度(度)')
plt.ylabel('半径')
plt.axis('off')
plt.show()
图 25:全向图像的极坐标变换
极坐标变换是将源图像的笛卡尔坐标 (x, y) 重新映射为目标图像的极坐标 ( r, \theta )。逆变换用于确定目标图像中每个像素在源图像中的对应坐标。
笛卡尔坐标转换为极坐标:
极坐标转换为笛卡尔坐标:
直接变换是将图像从笛卡尔坐标系 M 转换到极坐标系 M',步骤如下:
确定极坐标下点 M' 在全景图像中的位置:
假设我们有一幅原始图像,L 表示全景图像的宽度,a 表示原始图像的高度,b 表示原始图像的宽度。原始图像中的一个点表示为 M。
对应的全景图像中的点 M' 具有极坐标 ( \theta, r ),定义为:
\begin{cases} \theta = \frac{2 \pi L}{b} \\ r = \rho \cdot a \\ \rho = \frac{R}{2 \cdot a} \end{cases}其中 R 是全景图像的高度
使用转换公式将极坐标转换为笛卡尔坐标:
\begin{cases} x' = r \cdot \cos(\theta) \\ y' = r \cdot \sin(\theta) \end{cases}将原始图像中点 M 的灰度值赋给全景图像中的点 M'。
应用插值以细化结果。
d) 对源图像的每个 R、G、B 分量 I(:, :, k) 应用相同的处理,以获得转换后的彩色图像。
#%% 问题 2d
# 加载彩色图像
omni_color = cv2.imread('omni.png')
# 转换为 RGB 格式
omni_color_rgb = cv2.cvtColor(omni_color, cv2.COLOR_BGR2RGB)
channels = cv2.split(omni_color_rgb)
# 处理每个通道
polar_channels = []
for ch in channels:
ch_polar = map_coordinates(ch, [Y1.flatten(), X1.flatten()], order=1, mode='constant', cval=0)
ch_polar = ch_polar.reshape((r_max, theta_max))
polar_channels.append(ch_polar)
# 重组图像
omni_polar_color = cv2.merge(polar_channels)
# 显示结果
plt.figure(figsize=(8, 6))
plt.imshow(omni_polar_color.astype(np.uint8))
plt.title('彩色全景图像(极坐标变换)')
plt.axis('off')
plt.show()
# 比较灰度图像和彩色图像
fig, axs = plt.subplots(1, 2, figsize=(16, 6))
axs[0].imshow(omni_polar, cmap='gray')
axs[0].set_title('灰度全景图像')
axs[0].axis('off')
axs[1].imshow(omni_polar_color.astype(np.uint8))
axs[1].set_title('彩色全景图像')
axs[1].axis('off')
plt.tight_layout()
plt.show()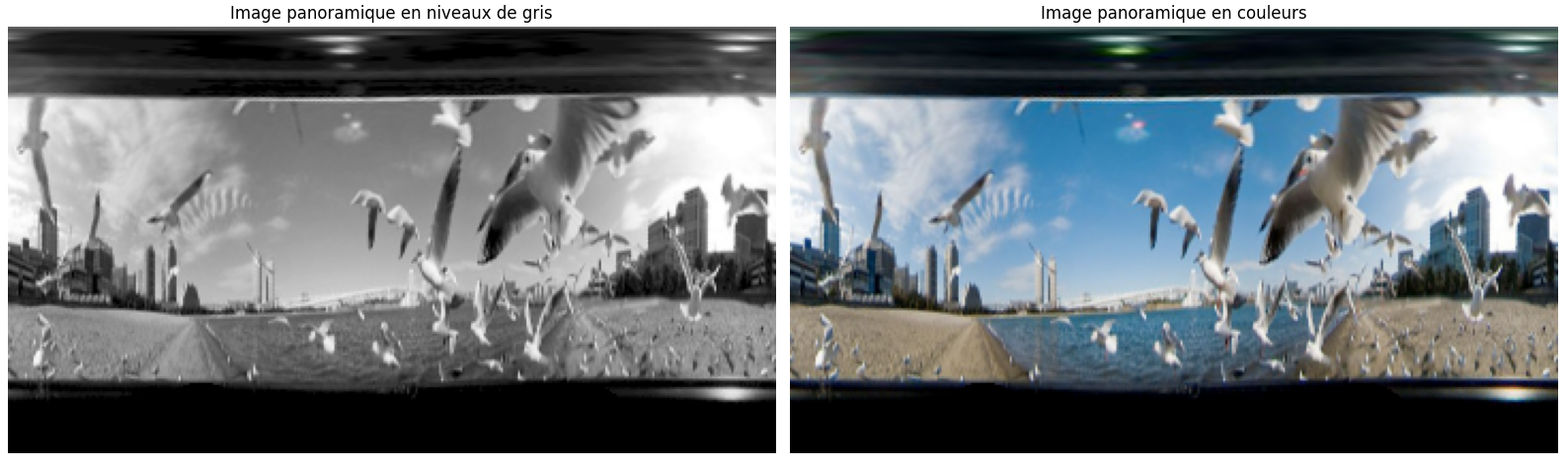
图 26:灰度和彩色转换图像的比较
通过分别处理每个颜色通道并将它们重新组合,我们在转换过程中保留了颜色信息。这使我们能够获得与源图像一致的彩色全景图像。
仿射变换
以下代码对图像 I 应用参数为 H 的单应变换,生成大小为 s = [Jh, Jw] 的图像 J。
def transformimage(I, H, s):
Jh = s[0]
Jw = s[1]
X2, Y2 = np.meshgrid(range(Jw), range(Jh))
X2 = X2.reshape(Jw * Jh)
Y2 = Y2.reshape(Jw * Jh)
invH = np.linalg.inv(H)
X = np.zeros((Jh * Jw))
Y = np.zeros((Jh * Jw))
for i in range(Jw * Jh):
P2 = np.array([X2[i], Y2[i], 1])
P = invH.dot(P2)
X[i] = P[0] / (P[2] + 1e-6) # 避免除以零
Y[i] = P[1] / (P[2] + 1e-6)
X = X.reshape(Jh, Jw)
Y = Y.reshape(Jh, Jw)
J = np.zeros((Jh, Jw, I.shape[2]), dtype=I.dtype)
for k in range(I.shape[2]):
J[:, :, k] = scipy.ndimage.map_coordinates(I[:, :, k], [Y, X], order=1, mode='constant', cval=0)
return Ja) 加载图像 lena256.png。应用该函数生成向量为 dx = +20, dy = +10 的平移,对应于以下单应矩阵:
#%% 问题 2a
# 加载图像
img = cv2.imread('lena256.png')
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 定义平移矩阵
H_translation = np.array([[1, 0, 20],
[0, 1, 10],
[0, 0, 1]])
# 定义输出图像的尺寸
s = [img_rgb.shape[0], img_rgb.shape[1]]
# 应用平移变换
transformed_translation = transformimage(img_rgb, H_translation, s)b) 应用围绕点 ( x_0, y_0 ) = (100, 100) 的比例因子为 s = 0.4 的缩放变换,矩阵 H 如下:
其中:
c) 应用围绕点 ( x_0, y_0 ) = (100, 100) 的角度为 \alpha = 20^\circ 的旋转变换,矩阵 H 如下:
其中:
#%% 问题 2c
# 定义旋转矩阵
angle_deg = 20
a = np.deg2rad(angle_deg)
x0, y0 = 100, 100
HT = np.array([[1, 0, x0],
[0, 1, y0],
[0, 0, 1]])
HT_inv = np.linalg.inv(HT)
HR = np.array([[np.cos(a), -np.sin(a), 0],
[np.sin(a), np.cos(a), 0],
[0, 0, 1]])
H_rotation = HT.dot(HR).dot(HT_inv)
# 应用旋转变换
transformed_rotation = transformimage(img_rgb, H_rotation, s)
# 比较图像
fig, axs = plt.subplots(1, 4, figsize=(20, 5))
axs[0].imshow(img_rgb)
axs[0].set_title('原始图像')
axs[0].axis('off')
axs[1].imshow(transformed_translation.astype(np.uint8))
axs[1].set_title('平移变换')
axs[1].axis('off')
axs[2].imshow(transformed_scaling.astype(np.uint8))
axs[2].set_title('缩放变换')
axs[2].axis('off')
axs[3].imshow(transformed_rotation.astype(np.uint8))
axs[3].set_title('旋转变换')
axs[3].axis('off')
plt.tight_layout()
plt.show()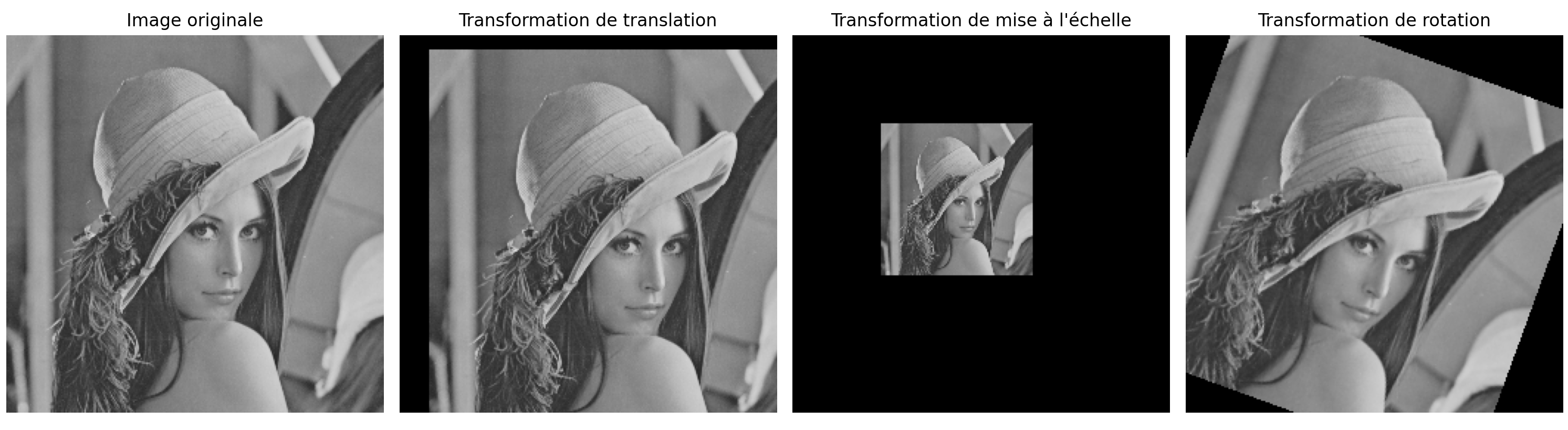
图 27:几何变换的比较
通过使用不同的仿射变换(平移、缩放、旋转),我们可以修改图像的位置、大小和方向。单应矩阵 H 允许根据所选参数精确控制这些变换。
单应变换
a) 定义 pts1 为源图像角点的坐标(顺序:左上角、右上角、左下角、右下角):
# 问题 3:单应变换
# a)定义源图像和目标图像的角点
s = img_rgb.shape
pts1 = np.float32([[0, 0], [s[1], 0], [0, s[0]], [s[1], s[0]]])b) 应用单应变换,将图像的四个角映射到用户选择的位置,并定义 pts2 为目标图像中的对应坐标(尺寸 Jh \times Jw = 256 \times 256)。
# 定义目标坐标
Jh, Jw = 256, 256
pts2 = np.float32([[50, 50], [Jh - 50, 30], [30, Jw - 50], [Jh - 50, Jw - 50]])c) 使用 getPerspectiveTransform 函数以矩阵 H 的形式计算单应变换参数。应用此矩阵转换图像。显示获得的图像,并在图像上叠加 pts2 点。
#%% b)计算单应变换并应用
# 计算单应变换矩阵
H_perspective = cv2.getPerspectiveTransform(pts1, pts2)
# 应用变换
transformed_perspective = cv2.warpPerspective(img_rgb, H_perspective, (Jw, Jh))
# 显示结果
fig, axs = plt.subplots(1, 2, figsize=(16, 6))
axs[0].imshow(img_rgb)
axs[0].set_title('原始图像')
axs[0].axis('off')
axs[1].imshow(transformed_perspective.astype(np.uint8))
axs[1].scatter(pts2[:, 0], pts2[:, 1], c='red', marker='o')
axs[1].set_title('单应变换的结果')
axs[1].axis('off')
plt.tight_layout()
plt.show()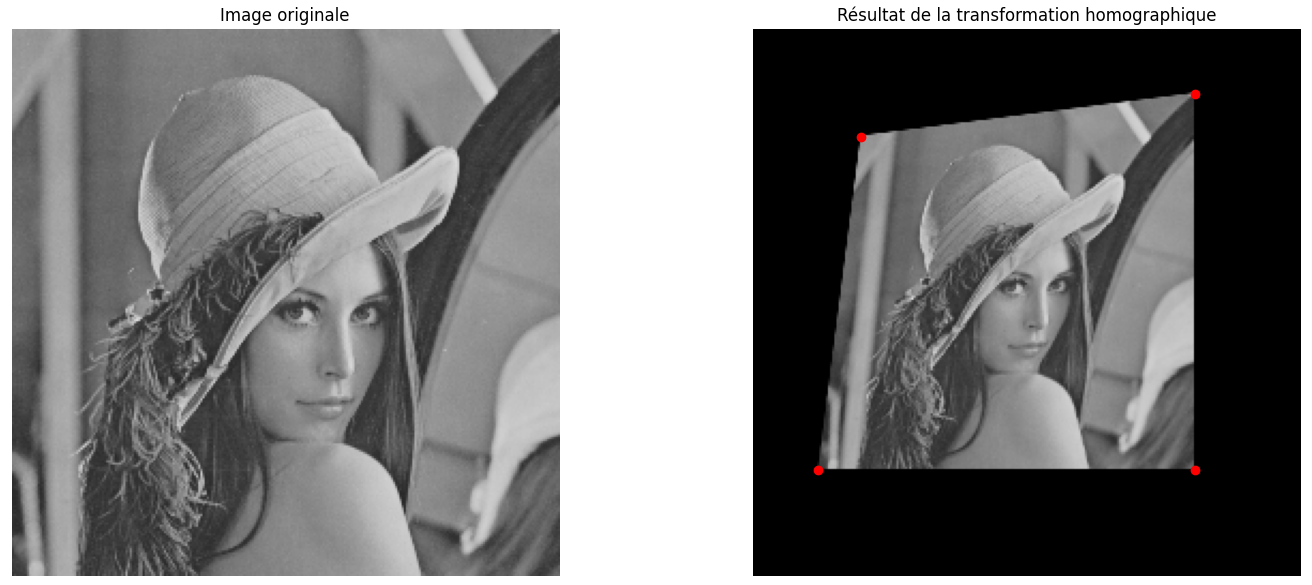
图像 29:应用单应变换
单应变换允许使用描述对应点关系的矩阵 H 将一个平面转换为另一个平面。这在透视校正或不同视图之间的映射中特别有用。这部分的具体理论公式见 3D重建理论